WHOI 2020 Innovative Technology Program SeaFlight Glider Development
Overview
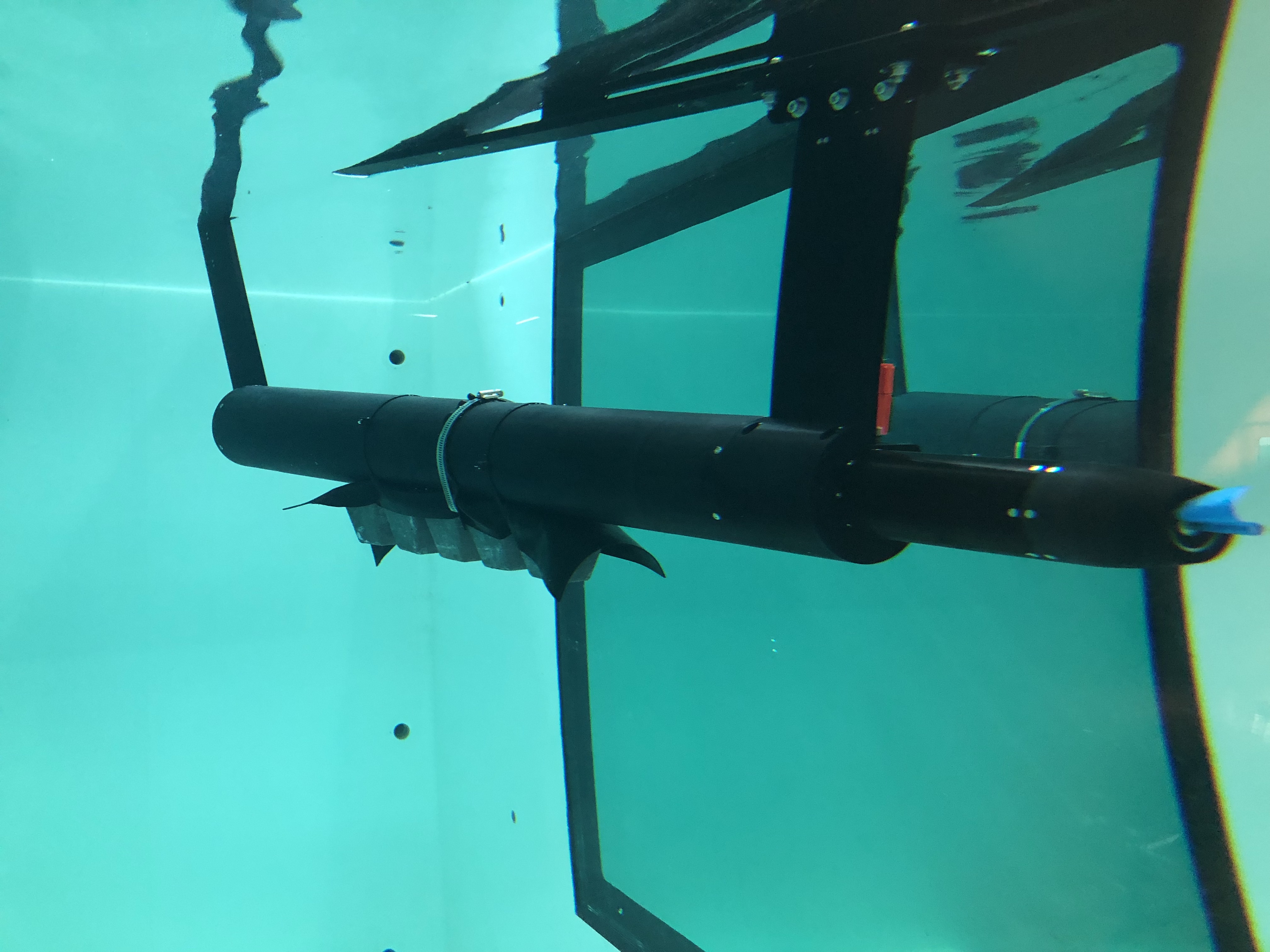
Our project goal was to use the ITP funding to expand from the first prototype Pitchathon concept [1] and a set of Open-Source design tenets [2] to design and build an open-source underwater AUV that is robust, repairable, accessible, sustainable and constructed from easily machined or off the shelf parts. The idealized autonomous glider would be capable of diving to 200 meter depths in the ocean, incorporate existing instruments (e.g. for subsea acoustic communication or CTD sensors), and be a testbed for future underwater open-source robotic research. The SeaFlight Glider buoyancy engine was assembled in AVAST (Figure 1) and completed the first tank test in August of 2022 where it successfully dived and surfaced in the AVAST test tank (Figure 3).
Progress toward our goal is described as a series of milestones achieved during 2021-2022.
2021 Milestones
As a first step, we designed a benchtop testbed on which to rapidly test and iterate the design of our new buoyancy engine. This was needed to gain immediate feedback on progress as elements were added to the design, such as the pressure sensors, controllers for power, motor movement and fluid valves, and the software modules that make it all work together.
Work began in the winter of 2021 on the glider buoyancy engine design, led by Jeremy Paulus, a mechanical engineer (formerly from WHOI). Prototyping of the closed-cycle hydraulic buoyancy engine was accelerated by using common internationally standardized components and the entire design was completed in < 500 person-hr.
The electronic control boards and their software were developed in parallel, and our first circuit board was completed in Feb of 2021. The integrated buoyancy engine control electronics were bench-tested in May 2021, during which the engine ran in a closed loop, cycling fluid to the internal/external reservoirs to change the glider buoyancy (if it was in the water).
The assembled electronics package to manage the external power supply, pressure sensing, buoyancy motor sensors, and actuating the pump were assembled from commonly available micro-controllers, and open-source software libraries. The design was completed by late 2021 and the main engine control circuit board was assembled by February of 2022.
2021 Community Growth
Collaboration was started with the technology teacher at Falmouth High School (FHS), Michael Campbell, who recommended two students, Harley Smith and Dalton Driscoll. The students were given an early development kit consisting of an Arduino and sensors. We began weekly meetings to go through the system and start working on small tasks, all remotely as covid was still present and WHOI was not open to outside visitors at the time.
Milestones 2022
Assembly and integration were simplified by mounting components on an 80/20 Aluminum extrusion, used as a rigid strongback on which assembled components were mounted (battery and engine pressure housing, control electronics, steering rudder, telemetry package (Figure 1)
The buoyancy engine and associated control electronics were assembled into the fabricated engine housing over the course of the summer of 2022. This work was largely completed by college and high school students as part of their summer internships.
Throughout the year parallel development continued on software to control the buoyancy engine, sample all the sensors, cycle through the dive phases via a state machine, log data from the sensors and state machine operation, navigate waypoints using a compass and GPS, and to log power usage.
In August 2022 we performed a successful test of the glider assembly and demonstrated the fundamental capability to autonomously descend and ascend in the AVAST tank.
As of October 27, 2022, the design of the battery/pitch control assembly is, the rudder is fabricated and assembled.
In September 2022, the existing collection of mechanical drawings, electrical designs, circuit board designs and software were all hosted on GitHub and became publicly available [3].

2022 Community Growth
Collaboration with Falmouth High School students continued weekly throughout the school year of 2022. Harley Smith (also a summer intern at AVAST) contributed software for logfile management and worked in the lab with Dalton Driscoll (also FHS) to complete and test assemblies. The FHS students were joined by two college engineering students, James Davis from Olin College of Engineering and Chiemeligo Onyemelukwe from UMASS Amherst.
Future Direction
Through a structured program of lab- and water-testing, the existing design can be matured. We hope to see it adopted by independent developers or commercialized through open-source licensing.
The core electronics kit (Arduino board and controllers) can be converted into a stand-alone development tool for enthusiasts, or students (the SeaFlight Glider Development kit). This tool kit can expand access to a larger community of scientists, engineers, and aspiring high-school and collegiate student who are excited by the potential of open-source robotics.
Collaborators
Woods Hole Oceanographic Institution: John Reine, Peter Brickley, Jeremy Paulus, Matthew Palanza, Colin Dobson. Oregon State University: Ian Black, Stuart Pearce. Olin College: James Davis. Univ. of Massachusetts Amherst: Chiemeligo Onyemelukwe. Falmouth High School: Harley Smith, Dalton Driscoll, Michael Campbell
References
[1] WHOI Pitchathon 2019 $75,000. Innovative Technology Award 27442 Dec. 2020 – Nov 2022, $99,920
[2] National Academies Ocean Decade U.S. Launch Meeting, Ocean Shots Presentations, February, 2021: http://seaflightglider.com/OceanShotReineBrickley.pdf
[3] Sea Flight Glider GitHub: https://github.com/SeaFlightGlider